LA TERMOCAMERA
THERMAL IMAGING CAMERA
- 12 Nov 2022

La misura della temperatura a distanza delle superfici di oggetti, può essere effettuata da strumenti quali le termocamere, il cui utilizzo si è recentemente ampliato nel settore edilizio, laddove, ad esempio, i detti apparati si sono dimostrati particolarmente efficaci nell’individuazione e mappatura delle perdite energetiche di un edificio. Una termocamera, in sintesi, rileva l’intensità della radiazione infrarossa emessa da un oggetto e la converte in un’immagine visibile. Richiamiamo brevemente alcuni concetti relativi alla radiazione infrarossa: la radiazione elettromagnetica osservabile, modellata come fenomeno ondulatorio, è suddivisa in porzioni del cosiddetto spettro elettromagnetico caratterizzate da diverse lunghezze d’onda o, reciprocamente, frequenze, come illustrato nella seguente immagine:
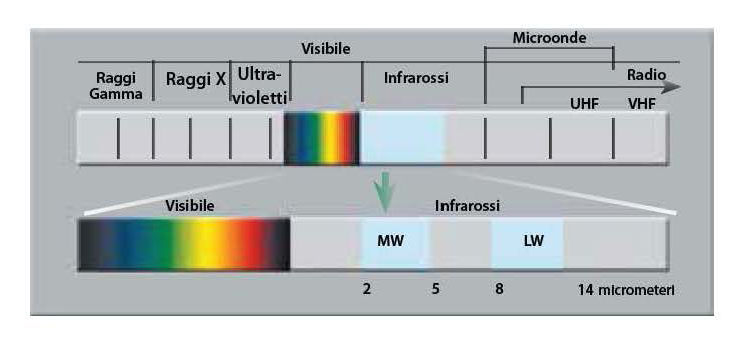
Fig. 1
La radiazione infrarossa, il cui spettro è situato tra la porzione dello spettro del visibile (cioè la porzione cui è sensibile l’occhio umano) e lo spettro delle microonde, è emessa da un qualsiasi oggetto che si trovi ad una temperatura superiore al cosiddetto zero assoluto (-273,15 °C, 0 Kelvin).
Vediamo ora i principali componenti di una termocamera:
- Lente: componente ottico (cristallo in Germanio o Silicio in dipendenza della diversa lunghezza d’onda oggetto di rilevamento) trasparente alla radiazione infrarossa, che focalizza la stessa sul sensore;
- Sensore: matrice bidimensionale (FPA – Focal Plane Array) di elementi che effettuano la rilevazione dell’intensità di radiazione infrarossa trasmessa dalla lente, la trasduzione della stessa in un segnale elettrico e l’invio di quest’ultimo al sistema elettronico di elaborazione dell’immagine. Nella famiglia dei sensori di tipo termico, si collocano i sensori microbolometrici (dal greco bolometron, ovvero misuratore di oggetti lanciati (raggi)), il cui principio di funzionamento è il seguente: la radiazione infrarossa colpisce il sensore e ne provoca il riscaldamento, cui segue una variazione della conduttività elettrica del materiale (silicio amorfo, ossido di vanadio) ed una corrispondente variazione di grandezze elettriche nel sensore. È da tale variazione che si ricava la misura di temperatura. Uno schema di principio di un sensore bolometrico è il seguente
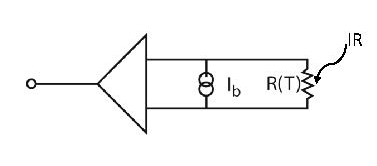
Fig. 2
La radiazione infrarossa investe la matrice, provocandone un aumento di temperatura, che a sua volta causa una variazione della resistenza elettrica R(T) ed una corrispondente variazione della tensione del circuito elettrico alimentato a corrente costante Ib.
Vediamo ora le principali caratteristiche di una termocamera:
- NETD (Noise Equivalent Temperature Difference), ovvero la sensibilità termica (espressa in °C): è il parametro specifico del sensore, per il quale differenze di temperatura inferiori al valore di NETD sono indistinguibili dal rumore (termico) di fondo;
- FRAME RATE, ovvero la frequenza di acquisizione (espressa in Hz): è il numero massimo di immagini termiche acquisibili in sequenza nell’unità di tempo;
- PIXEL RESOLUTION, ovvero la risoluzione geometrica (espressa in pixel): è il numero di pixel compresi in un’immagine termica e corrisponde, in linea teorica, al numero di rilevatori nella matrice del sensore;
- FOV (Field Of View), ovvero il campo di vista (espresso in gradi angolari): è l’angolo solido che può essere osservato dalla termocamera e determina l’estensione della superficie di un oggetto che la termocamera può rilevare, in funzione della distanza dallo stesso;
- IFOV (Instantaneous Field Of View), ovvero il campo di vista istantaneo o risoluzione spaziale (espressa in milliradianti): è l’angolo solido che può essere osservato dal singolo rilevatore presente nella matrice del sensore e corrisponde alla dimensione (es. diametro) della minore superficie di cui il sistema è in grado di misurare la temperatura, ad un data distanza.
Fonti:
“Manuale di termografia ad infrarossi” – FLIR
 Ing. Fabio Di Matteo – ZED PROGETTI srl
Ing. Fabio Di Matteo – ZED PROGETTI srl
The remote measurement of the temperature of the surfaces of objects can be carried out by instruments such as thermal imaging cameras, whose use has recently expanded in the building sector, where, for example, these devices have proved to be particularly effective in identifying and mapping the energy losses of a building. A thermal imaging camera, in short, detects the intensity of the infrared radiation emitted by an object and converts it into a visible image. Let’s briefly recall some concepts related to infrared radiation: the observable electromagnetic radiation, modelled as an undulatory phenomenon, is divided into portions of the so-called electromagnetic spectrum characterized by different wavelengths or, reciprocally, frequencies, as shown in the Fig. 2.
Infrared radiation, the spectrum of which lies between the portion of the visible spectrum (i.e. the portion to which the human eye is sensitive) and the microwave spectrum, is emitted by any object at a temperature above the so-called absolute zero (-273.15 °C, 0 Kelvin).
Let’s now see the main components of a thermal imaging camera:
– Lens: optical component (Germanium or Silicon crystal depending on the different wavelength being detected) transparent to infrared radiation, which focuses the same on the sensor;
– Sensor: two-dimensional matrix (FPA – Focal Plane Array) of elements that detect the intensity of infrared radiation transmitted by the lens, the transduction of the same into an electrical signal and the sending of the latter to the electronic image processing system. In the family of thermal sensors, there are the microbolometric sensors (from the Greek bolometron, i.e. measuring thrown objects (rays)), whose operating principle is as follows: the infrared radiation hits the sensor and causes its heating, followed by a change in the electrical conductivity of the material (amorphous silicon, vanadium oxide) and a corresponding change in electrical quantities in the sensor. It is from this variation that the temperature measurement is obtained. A schematic principle of a bolometric sensor is as in Fig. 3
The infrared radiation invests the matrix, causing an increase in temperature, which in turn causes a change in the electrical resistance R(T) and a corresponding change in the voltage of the electrical circuit powered by constant current Ib.
Let’s see now the main characteristics of a thermal imaging camera:
– NETD (Noise Equivalent Temperature Difference), i.e. the thermal sensitivity (expressed in °C): is the specific parameter of the sensor, for which temperature differences below the NETD value are indistinguishable from the background (thermal) noise;
– FRAME RATE, i.e. the acquisition frequency (expressed in Hz): this is the maximum number of thermal images that can be acquired in sequence in the time unit;
– PIXEL RESOLUTION, that is the geometric resolution (expressed in pixels): it is the number of pixels included in a thermal image and corresponds, in theory, to the number of detectors in the sensor matrix;
– FOV (Field Of View, expressed in angular degrees): this is the solid angle that can be observed by the thermal imaging camera and determines the extent of the surface of an object that the thermal imaging camera can detect, depending on the distance from it;
– IFOV (Instantaneous Field Of View), or spatial resolution (expressed in milliradians): is the solid angle that can be observed by the single detector present in the sensor matrix and corresponds to the size (e.g. diameter) of the smaller surface area of which the system is able to measure the temperature, at a given distance.